1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
|
%global _empty_manifest_terminate_build 0
Name: python-MAPLEAF
Version: 0.8.16
Release: 1
Summary: A compact, extensible rocket flight simulation framework for researchers and rocket designers
License: MIT
URL: https://github.com/henrystoldt/MAPLEAF
Source0: https://mirrors.aliyun.com/pypi/web/packages/fb/de/7c6747eccbe36cbb348cced114d6e8ab730be16a0cad213980b89ec5819c/MAPLEAF-0.8.16.tar.gz
BuildArch: noarch
%description
<p align="center">
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/Draft2Logo.png" alt="Logo"
title="MAPLEAF" height=150 style="padding-right: 10px;"/>
<h1 align="center">Modular Aerospace Prediction Lab for Engines and Aero Forces</h1>
</p>
<p align="center">
<a align="center" href="https://github.com/henrystoldt/mapleaf/actions"><img alt="Tests" src="https://github.com/henrystoldt/mapleaf/workflows/Tests/badge.svg"></a>
<a align="center" href="https://github.com/henrystoldt/mapleaf/actions"><img alt="Linting" src="https://github.com/henrystoldt/mapleaf/workflows/Linting/badge.svg"></a>
<a align="center" href="https://henrystoldt.github.io/MAPLEAF/"><img alt="Docs" src="https://github.com/henrystoldt/mapleaf/workflows/Docs/badge.svg"></a>
<a align="center" href="https://codecov.io/gh/henrystoldt/mapleaf"><img alt="Coverage" src="https://codecov.io/gh/henrystoldt/mapleaf/branch/master/graph/badge.svg"></a>
<img alt="Python3" src="https://img.shields.io/badge/python-3.6+-brightgreen">
<a align="center" href="https://lbesson.mit-license.org/"><img alt="MIT License" src="https://img.shields.io/badge/License-MIT-blue.svg"></a>
</p>
## Install:
Prerequisites:
- [Python 3.6+](https://www.python.org/downloads/) (**[64-bit](https://stackoverflow.com/questions/1842544/how-do-i-detect-if-python-is-running-as-a-64-bit-application)**)
- Linux/WSL: install python3.X-dev package (includes python header files for Cython)
- C/C++ compilers OR an existing installation of [Cython](https://cython.readthedocs.io/en/latest/src/quickstart/install.html)
- Windows: install visual studio build tools or MinGW
- (Recommended) A Python [virtual environment](https://towardsdatascience.com/virtual-environments-104c62d48c54). See [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md#create-python-virtual-environment-with-virtualenvwrapper)
`$ pip install MAPLEAF`
The (optional) dependencies used to enable 3D flight path renders (mayavi) and parallelization (ray) are not installed by default because they're often tricky to get running. Run the installOptionalPackages.py script to try installing them if you want to use those capabilities. See ray and mayavi github pages/documentation for help getting them installed.
### Test your installation
Unit tests:
`$ python -m unittest -v`
Regression tests:
`$ mapleaf-batch`
See [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md) for more information, or the [verification and validation section](https://henrystoldt.github.io/MAPLEAF/V&V/index.html) of the code documentation for the expected results of the regression tests.
## Developers
Contributions are welcome.
To learn about the code, have a look at [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md), and the [code documentation website](https://henrystoldt.github.io/MAPLEAF/)
## Running a Simulation
`$ mapleaf path/to/SimDefinitionFile.mapleaf`
Sample simulation definitions: [MAPLEAF/Examples/Simulations](https://github.com/henrystoldt/MAPLEAF/tree/master/MAPLEAF/Examples/Simulations)
Example cases be run with just the case name: `$ mapleaf NASATwoStageOrbitalRocket`
This is the same as running: `$ mapleaf MAPLEAF/Examples/Simulations/NASATwoStageOrbitalRocket.mapleaf` from MAPLEAF's install location
Help: `$ mapleaf -h`
### Simulation Definition Files
Brief overview below. **More info, and definitions of all possible options in:** [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf)
Format is a simple key-value syntax similar to JSON or YAML.
Dictionaries can be nested arbitrarily deeply and are brace-delimited.
Keys and values in a dictionary are separated by the first whitespace in their line
No multiline values
Example:
```
SimControl{
timeDiscretization RK45Adaptive
TimeStepAdaptation{
controller PID
PID.coefficients -0.01 -0.001 0
targetError 0.0001
}
}
```
[Code folding](https://code.visualstudio.com/docs/editor/codebasics#_folding) and [syntax highlighting](https://marketplace.visualstudio.com/items?itemName=MAPLEAF.MAPLEAF) are helpful in maintaining a file overview:
The possible top level dictionaries are 'Optimization', 'MonteCarlo', 'SimControl', 'Environment', and 'Rocket'.
Of these, only the 'Rocket' dictionary is strictly required to run a simulation, and defines the rocket's initial position/velocity and the inertial/aerodynamic/control models used to simulate it.
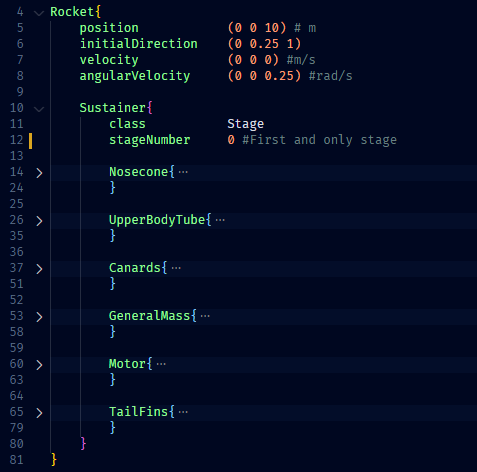
The rocket is defined by nested subdictionaries, where the first level of nesting defines the rocket's stage(s) and the second level defines the component(s) in each stage:
Default values from the defaultConfigValues dictionary in [MAPLEAF/IO/SimDefinition.py](https://github.com/henrystoldt/MAPLEAF/blob/master/MAPLEAF/IO/SimDefinition.py) will fill in for omitted keys.
Most defaults match the values in [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf).
## Simulation Outputs
Depending on the options specified in the `SimControl` dictionary, MAPLEAF will output:
- Detailed tabulated simulation position, component force, aerodynamic coefficient and control logs (see SimControl.loggingLevel):

- Flight animations (see SimControl.plot)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/FlightAnimation.gif?raw=true" alt="Flight Animation"
title="MAPLEAF" height=225 style="padding-right: 10px;"/>
- Flight path visualizations (see SimControl.plot - [Mayavi](https://github.com/enthought/mayavi) is required to render these ones showing the Earth)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/EarthOrbit.png?raw=true" alt="Earth Orbit"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
- Plots of any logged parameter (see SimControl.plot or --plotFromLog command line option)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/PlottingFromLogs.png?raw=true" alt="Plotting from logs"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Monte Carlo Simulations
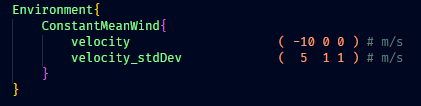
Monte Carlo simulations propagate uncertainties in simulation inputs through to simulation outputs.
Any scalar or vector parameter in simulation definition files can be made probabilistic by adding a second parameter with `_stdDev` appended to the name:
To execute a batch run of this now-probabilistic simulation, create the top-level 'Monte Carlo' dictionary (see [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf))
Then, MAPLEAF can produce distributions of outputs like landing locations:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/LandingLocationPlot.png?raw=true" alt="Landing Location Plot"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Design Optimization
MAPLEAF uses [pyswarms](https://github.com/ljvmiranda921/pyswarms) to optimize arbitrary scalar parameters according to arbitrary cost functions using Particle Swarm Optimization.
To define an optimization problem, include the top-level 'Optimization' dictionary (see [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf)):
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/SimDefinition_Optimization.PNG?raw=true" alt="Optimization Dict"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
Pyswarms will produce a plot of the optimization results after completion:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/OptimizationResult.png?raw=true" alt="Optimization Result"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Batch Simulations
Automates running and post-processing groups of cases.
To run: `$ mapleaf-batch path/to/batchDefinitionFile`
For help: `$ mapleaf-batch -h`

Provides ability to automate production of detailed plots of MAPLEAF's results compared to verification/validation data, and to run Wind-Tunnel style aero-sweep simulations:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/CantedFinRocketPlot.png?raw=true" alt="Canted Fin Roll Rate"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/ParametricFin5CAvsMach.png?raw=true" alt="Wind Tunnel Comparison"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
Used for regression and verification/validation testing in MAPLEAF.
See [batchRunTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/batchRunTemplate.mapleaf) for complete batch interface definition and [regressionTests.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/MAPLEAF/Examples/BatchSims/regressionTests.mapleaf) for examples.
To run the regression/verification/validation test suite, check out [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md)
## Parallelization
To run **Monte Carlo** or **Optimization** simulations in parallel:
`mapleaf --parallel MonteCarlo.mapleaf`
MAPLEAF's parallelization is implemented using [ray](https://github.com/ray-project/ray).
%package -n python3-MAPLEAF
Summary: A compact, extensible rocket flight simulation framework for researchers and rocket designers
Provides: python-MAPLEAF
BuildRequires: python3-devel
BuildRequires: python3-setuptools
BuildRequires: python3-pip
%description -n python3-MAPLEAF
<p align="center">
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/Draft2Logo.png" alt="Logo"
title="MAPLEAF" height=150 style="padding-right: 10px;"/>
<h1 align="center">Modular Aerospace Prediction Lab for Engines and Aero Forces</h1>
</p>
<p align="center">
<a align="center" href="https://github.com/henrystoldt/mapleaf/actions"><img alt="Tests" src="https://github.com/henrystoldt/mapleaf/workflows/Tests/badge.svg"></a>
<a align="center" href="https://github.com/henrystoldt/mapleaf/actions"><img alt="Linting" src="https://github.com/henrystoldt/mapleaf/workflows/Linting/badge.svg"></a>
<a align="center" href="https://henrystoldt.github.io/MAPLEAF/"><img alt="Docs" src="https://github.com/henrystoldt/mapleaf/workflows/Docs/badge.svg"></a>
<a align="center" href="https://codecov.io/gh/henrystoldt/mapleaf"><img alt="Coverage" src="https://codecov.io/gh/henrystoldt/mapleaf/branch/master/graph/badge.svg"></a>
<img alt="Python3" src="https://img.shields.io/badge/python-3.6+-brightgreen">
<a align="center" href="https://lbesson.mit-license.org/"><img alt="MIT License" src="https://img.shields.io/badge/License-MIT-blue.svg"></a>
</p>
## Install:
Prerequisites:
- [Python 3.6+](https://www.python.org/downloads/) (**[64-bit](https://stackoverflow.com/questions/1842544/how-do-i-detect-if-python-is-running-as-a-64-bit-application)**)
- Linux/WSL: install python3.X-dev package (includes python header files for Cython)
- C/C++ compilers OR an existing installation of [Cython](https://cython.readthedocs.io/en/latest/src/quickstart/install.html)
- Windows: install visual studio build tools or MinGW
- (Recommended) A Python [virtual environment](https://towardsdatascience.com/virtual-environments-104c62d48c54). See [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md#create-python-virtual-environment-with-virtualenvwrapper)
`$ pip install MAPLEAF`
The (optional) dependencies used to enable 3D flight path renders (mayavi) and parallelization (ray) are not installed by default because they're often tricky to get running. Run the installOptionalPackages.py script to try installing them if you want to use those capabilities. See ray and mayavi github pages/documentation for help getting them installed.
### Test your installation
Unit tests:
`$ python -m unittest -v`
Regression tests:
`$ mapleaf-batch`
See [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md) for more information, or the [verification and validation section](https://henrystoldt.github.io/MAPLEAF/V&V/index.html) of the code documentation for the expected results of the regression tests.
## Developers
Contributions are welcome.
To learn about the code, have a look at [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md), and the [code documentation website](https://henrystoldt.github.io/MAPLEAF/)
## Running a Simulation
`$ mapleaf path/to/SimDefinitionFile.mapleaf`
Sample simulation definitions: [MAPLEAF/Examples/Simulations](https://github.com/henrystoldt/MAPLEAF/tree/master/MAPLEAF/Examples/Simulations)
Example cases be run with just the case name: `$ mapleaf NASATwoStageOrbitalRocket`
This is the same as running: `$ mapleaf MAPLEAF/Examples/Simulations/NASATwoStageOrbitalRocket.mapleaf` from MAPLEAF's install location
Help: `$ mapleaf -h`
### Simulation Definition Files
Brief overview below. **More info, and definitions of all possible options in:** [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf)
Format is a simple key-value syntax similar to JSON or YAML.
Dictionaries can be nested arbitrarily deeply and are brace-delimited.
Keys and values in a dictionary are separated by the first whitespace in their line
No multiline values
Example:
```
SimControl{
timeDiscretization RK45Adaptive
TimeStepAdaptation{
controller PID
PID.coefficients -0.01 -0.001 0
targetError 0.0001
}
}
```
[Code folding](https://code.visualstudio.com/docs/editor/codebasics#_folding) and [syntax highlighting](https://marketplace.visualstudio.com/items?itemName=MAPLEAF.MAPLEAF) are helpful in maintaining a file overview:

The possible top level dictionaries are 'Optimization', 'MonteCarlo', 'SimControl', 'Environment', and 'Rocket'.
Of these, only the 'Rocket' dictionary is strictly required to run a simulation, and defines the rocket's initial position/velocity and the inertial/aerodynamic/control models used to simulate it.
The rocket is defined by nested subdictionaries, where the first level of nesting defines the rocket's stage(s) and the second level defines the component(s) in each stage:

Default values from the defaultConfigValues dictionary in [MAPLEAF/IO/SimDefinition.py](https://github.com/henrystoldt/MAPLEAF/blob/master/MAPLEAF/IO/SimDefinition.py) will fill in for omitted keys.
Most defaults match the values in [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf).
## Simulation Outputs
Depending on the options specified in the `SimControl` dictionary, MAPLEAF will output:
- Detailed tabulated simulation position, component force, aerodynamic coefficient and control logs (see SimControl.loggingLevel):

- Flight animations (see SimControl.plot)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/FlightAnimation.gif?raw=true" alt="Flight Animation"
title="MAPLEAF" height=225 style="padding-right: 10px;"/>
- Flight path visualizations (see SimControl.plot - [Mayavi](https://github.com/enthought/mayavi) is required to render these ones showing the Earth)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/EarthOrbit.png?raw=true" alt="Earth Orbit"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
- Plots of any logged parameter (see SimControl.plot or --plotFromLog command line option)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/PlottingFromLogs.png?raw=true" alt="Plotting from logs"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Monte Carlo Simulations
Monte Carlo simulations propagate uncertainties in simulation inputs through to simulation outputs.
Any scalar or vector parameter in simulation definition files can be made probabilistic by adding a second parameter with `_stdDev` appended to the name:

To execute a batch run of this now-probabilistic simulation, create the top-level 'Monte Carlo' dictionary (see [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf))
Then, MAPLEAF can produce distributions of outputs like landing locations:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/LandingLocationPlot.png?raw=true" alt="Landing Location Plot"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Design Optimization
MAPLEAF uses [pyswarms](https://github.com/ljvmiranda921/pyswarms) to optimize arbitrary scalar parameters according to arbitrary cost functions using Particle Swarm Optimization.
To define an optimization problem, include the top-level 'Optimization' dictionary (see [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf)):
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/SimDefinition_Optimization.PNG?raw=true" alt="Optimization Dict"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
Pyswarms will produce a plot of the optimization results after completion:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/OptimizationResult.png?raw=true" alt="Optimization Result"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Batch Simulations
Automates running and post-processing groups of cases.
To run: `$ mapleaf-batch path/to/batchDefinitionFile`
For help: `$ mapleaf-batch -h`

Provides ability to automate production of detailed plots of MAPLEAF's results compared to verification/validation data, and to run Wind-Tunnel style aero-sweep simulations:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/CantedFinRocketPlot.png?raw=true" alt="Canted Fin Roll Rate"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/ParametricFin5CAvsMach.png?raw=true" alt="Wind Tunnel Comparison"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
Used for regression and verification/validation testing in MAPLEAF.
See [batchRunTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/batchRunTemplate.mapleaf) for complete batch interface definition and [regressionTests.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/MAPLEAF/Examples/BatchSims/regressionTests.mapleaf) for examples.
To run the regression/verification/validation test suite, check out [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md)
## Parallelization
To run **Monte Carlo** or **Optimization** simulations in parallel:
`mapleaf --parallel MonteCarlo.mapleaf`
MAPLEAF's parallelization is implemented using [ray](https://github.com/ray-project/ray).
%package help
Summary: Development documents and examples for MAPLEAF
Provides: python3-MAPLEAF-doc
%description help
<p align="center">
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/Draft2Logo.png" alt="Logo"
title="MAPLEAF" height=150 style="padding-right: 10px;"/>
<h1 align="center">Modular Aerospace Prediction Lab for Engines and Aero Forces</h1>
</p>
<p align="center">
<a align="center" href="https://github.com/henrystoldt/mapleaf/actions"><img alt="Tests" src="https://github.com/henrystoldt/mapleaf/workflows/Tests/badge.svg"></a>
<a align="center" href="https://github.com/henrystoldt/mapleaf/actions"><img alt="Linting" src="https://github.com/henrystoldt/mapleaf/workflows/Linting/badge.svg"></a>
<a align="center" href="https://henrystoldt.github.io/MAPLEAF/"><img alt="Docs" src="https://github.com/henrystoldt/mapleaf/workflows/Docs/badge.svg"></a>
<a align="center" href="https://codecov.io/gh/henrystoldt/mapleaf"><img alt="Coverage" src="https://codecov.io/gh/henrystoldt/mapleaf/branch/master/graph/badge.svg"></a>
<img alt="Python3" src="https://img.shields.io/badge/python-3.6+-brightgreen">
<a align="center" href="https://lbesson.mit-license.org/"><img alt="MIT License" src="https://img.shields.io/badge/License-MIT-blue.svg"></a>
</p>
## Install:
Prerequisites:
- [Python 3.6+](https://www.python.org/downloads/) (**[64-bit](https://stackoverflow.com/questions/1842544/how-do-i-detect-if-python-is-running-as-a-64-bit-application)**)
- Linux/WSL: install python3.X-dev package (includes python header files for Cython)
- C/C++ compilers OR an existing installation of [Cython](https://cython.readthedocs.io/en/latest/src/quickstart/install.html)
- Windows: install visual studio build tools or MinGW
- (Recommended) A Python [virtual environment](https://towardsdatascience.com/virtual-environments-104c62d48c54). See [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md#create-python-virtual-environment-with-virtualenvwrapper)
`$ pip install MAPLEAF`
The (optional) dependencies used to enable 3D flight path renders (mayavi) and parallelization (ray) are not installed by default because they're often tricky to get running. Run the installOptionalPackages.py script to try installing them if you want to use those capabilities. See ray and mayavi github pages/documentation for help getting them installed.
### Test your installation
Unit tests:
`$ python -m unittest -v`
Regression tests:
`$ mapleaf-batch`
See [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md) for more information, or the [verification and validation section](https://henrystoldt.github.io/MAPLEAF/V&V/index.html) of the code documentation for the expected results of the regression tests.
## Developers
Contributions are welcome.
To learn about the code, have a look at [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md), and the [code documentation website](https://henrystoldt.github.io/MAPLEAF/)
## Running a Simulation
`$ mapleaf path/to/SimDefinitionFile.mapleaf`
Sample simulation definitions: [MAPLEAF/Examples/Simulations](https://github.com/henrystoldt/MAPLEAF/tree/master/MAPLEAF/Examples/Simulations)
Example cases be run with just the case name: `$ mapleaf NASATwoStageOrbitalRocket`
This is the same as running: `$ mapleaf MAPLEAF/Examples/Simulations/NASATwoStageOrbitalRocket.mapleaf` from MAPLEAF's install location
Help: `$ mapleaf -h`
### Simulation Definition Files
Brief overview below. **More info, and definitions of all possible options in:** [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf)
Format is a simple key-value syntax similar to JSON or YAML.
Dictionaries can be nested arbitrarily deeply and are brace-delimited.
Keys and values in a dictionary are separated by the first whitespace in their line
No multiline values
Example:
```
SimControl{
timeDiscretization RK45Adaptive
TimeStepAdaptation{
controller PID
PID.coefficients -0.01 -0.001 0
targetError 0.0001
}
}
```
[Code folding](https://code.visualstudio.com/docs/editor/codebasics#_folding) and [syntax highlighting](https://marketplace.visualstudio.com/items?itemName=MAPLEAF.MAPLEAF) are helpful in maintaining a file overview:

The possible top level dictionaries are 'Optimization', 'MonteCarlo', 'SimControl', 'Environment', and 'Rocket'.
Of these, only the 'Rocket' dictionary is strictly required to run a simulation, and defines the rocket's initial position/velocity and the inertial/aerodynamic/control models used to simulate it.
The rocket is defined by nested subdictionaries, where the first level of nesting defines the rocket's stage(s) and the second level defines the component(s) in each stage:

Default values from the defaultConfigValues dictionary in [MAPLEAF/IO/SimDefinition.py](https://github.com/henrystoldt/MAPLEAF/blob/master/MAPLEAF/IO/SimDefinition.py) will fill in for omitted keys.
Most defaults match the values in [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf).
## Simulation Outputs
Depending on the options specified in the `SimControl` dictionary, MAPLEAF will output:
- Detailed tabulated simulation position, component force, aerodynamic coefficient and control logs (see SimControl.loggingLevel):

- Flight animations (see SimControl.plot)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/FlightAnimation.gif?raw=true" alt="Flight Animation"
title="MAPLEAF" height=225 style="padding-right: 10px;"/>
- Flight path visualizations (see SimControl.plot - [Mayavi](https://github.com/enthought/mayavi) is required to render these ones showing the Earth)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/EarthOrbit.png?raw=true" alt="Earth Orbit"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
- Plots of any logged parameter (see SimControl.plot or --plotFromLog command line option)
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/PlottingFromLogs.png?raw=true" alt="Plotting from logs"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Monte Carlo Simulations
Monte Carlo simulations propagate uncertainties in simulation inputs through to simulation outputs.
Any scalar or vector parameter in simulation definition files can be made probabilistic by adding a second parameter with `_stdDev` appended to the name:

To execute a batch run of this now-probabilistic simulation, create the top-level 'Monte Carlo' dictionary (see [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf))
Then, MAPLEAF can produce distributions of outputs like landing locations:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/LandingLocationPlot.png?raw=true" alt="Landing Location Plot"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Design Optimization
MAPLEAF uses [pyswarms](https://github.com/ljvmiranda921/pyswarms) to optimize arbitrary scalar parameters according to arbitrary cost functions using Particle Swarm Optimization.
To define an optimization problem, include the top-level 'Optimization' dictionary (see [SimDefinitionTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/SimDefinitionTemplate.mapleaf)):
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/SimDefinition_Optimization.PNG?raw=true" alt="Optimization Dict"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
Pyswarms will produce a plot of the optimization results after completion:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/OptimizationResult.png?raw=true" alt="Optimization Result"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
## Batch Simulations
Automates running and post-processing groups of cases.
To run: `$ mapleaf-batch path/to/batchDefinitionFile`
For help: `$ mapleaf-batch -h`

Provides ability to automate production of detailed plots of MAPLEAF's results compared to verification/validation data, and to run Wind-Tunnel style aero-sweep simulations:
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/CantedFinRocketPlot.png?raw=true" alt="Canted Fin Roll Rate"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
<img src="https://raw.githubusercontent.com/henrystoldt/MAPLEAF/master/Resources/ParametricFin5CAvsMach.png?raw=true" alt="Wind Tunnel Comparison"
title="MAPLEAF" height=300 style="padding-right: 10px;"/>
Used for regression and verification/validation testing in MAPLEAF.
See [batchRunTemplate.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/batchRunTemplate.mapleaf) for complete batch interface definition and [regressionTests.mapleaf](https://github.com/henrystoldt/MAPLEAF/blob/master/MAPLEAF/Examples/BatchSims/regressionTests.mapleaf) for examples.
To run the regression/verification/validation test suite, check out [README_Dev.md](https://github.com/henrystoldt/MAPLEAF/blob/master/README_Dev.md)
## Parallelization
To run **Monte Carlo** or **Optimization** simulations in parallel:
`mapleaf --parallel MonteCarlo.mapleaf`
MAPLEAF's parallelization is implemented using [ray](https://github.com/ray-project/ray).
%prep
%autosetup -n MAPLEAF-0.8.16
%build
%py3_build
%install
%py3_install
install -d -m755 %{buildroot}/%{_pkgdocdir}
if [ -d doc ]; then cp -arf doc %{buildroot}/%{_pkgdocdir}; fi
if [ -d docs ]; then cp -arf docs %{buildroot}/%{_pkgdocdir}; fi
if [ -d example ]; then cp -arf example %{buildroot}/%{_pkgdocdir}; fi
if [ -d examples ]; then cp -arf examples %{buildroot}/%{_pkgdocdir}; fi
pushd %{buildroot}
if [ -d usr/lib ]; then
find usr/lib -type f -printf "\"/%h/%f\"\n" >> filelist.lst
fi
if [ -d usr/lib64 ]; then
find usr/lib64 -type f -printf "\"/%h/%f\"\n" >> filelist.lst
fi
if [ -d usr/bin ]; then
find usr/bin -type f -printf "\"/%h/%f\"\n" >> filelist.lst
fi
if [ -d usr/sbin ]; then
find usr/sbin -type f -printf "\"/%h/%f\"\n" >> filelist.lst
fi
touch doclist.lst
if [ -d usr/share/man ]; then
find usr/share/man -type f -printf "\"/%h/%f.gz\"\n" >> doclist.lst
fi
popd
mv %{buildroot}/filelist.lst .
mv %{buildroot}/doclist.lst .
%files -n python3-MAPLEAF -f filelist.lst
%dir %{python3_sitelib}/*
%files help -f doclist.lst
%{_docdir}/*
%changelog
* Tue Jun 20 2023 Python_Bot <Python_Bot@openeuler.org> - 0.8.16-1
- Package Spec generated
|
