
diff options
| author | CoprDistGit <infra@openeuler.org> | 2023-05-05 13:25:25 +0000 |
|---|---|---|
| committer | CoprDistGit <infra@openeuler.org> | 2023-05-05 13:25:25 +0000 |
| commit | aad3aeefb2b3b55ff421bd45d4b8abd5ef96498c (patch) | |
| tree | c8e7ad496d8873ae0065b6ed0cf041d706db44d3 | |
| parent | fd531cf44cb429df458205a96e4b2d16a633c765 (diff) | |
automatic import of python-pydynamicopeneuler20.03
| -rw-r--r-- | .gitignore | 1 | ||||
| -rw-r--r-- | python-pydynamic.spec | 767 | ||||
| -rw-r--r-- | sources | 1 |
3 files changed, 769 insertions, 0 deletions
@@ -0,0 +1 @@ +/PyDynamic-2.4.0.tar.gz diff --git a/python-pydynamic.spec b/python-pydynamic.spec new file mode 100644 index 0000000..5a115e4 --- /dev/null +++ b/python-pydynamic.spec @@ -0,0 +1,767 @@ +%global _empty_manifest_terminate_build 0 +Name: python-PyDynamic +Version: 2.4.0 +Release: 1 +Summary: A software package for the analysis of dynamic measurements +License: GNU Lesser General Public License v3 or later (LGPLv3+) +URL: https://ptb-m4d.github.io/PyDynamic/ +Source0: https://mirrors.nju.edu.cn/pypi/web/packages/cf/71/7e6aa3ccafff569b1631bf86ff902b26473e99d96247c5cb9281905ed264/PyDynamic-2.4.0.tar.gz +BuildArch: noarch + +Requires: python3-matplotlib +Requires: python3-numpy +Requires: python3-pandas +Requires: python3-scipy +Requires: python3-sympy +Requires: python3-PyWavelets +Requires: python3-time-series-buffer +Requires: python3-notebook + +%description +<img src="https://raw.githubusercontent.com/PTB-M4D/PyDynamic/main/docs/PyDynamic_logo.svg" alt="the logo of PyDynamic" title="PyDynamic logo"> +<p align="center"> + <!-- CircleCI Tests --> + <a href="https://circleci.com/gh/PTB-M4D/PyDynamic"><img alt="CircleCI pipeline status badge" src="https://circleci.com/gh/PTB-M4D/PyDynamic.svg?style=shield"></a> + <!-- ReadTheDocs Documentation --> + <a href="https://pydynamic.readthedocs.io/en/latest/index.html"> + <img src="https://readthedocs.org/projects/pydynamic/badge/?version=latest" alt="PyDynamic's ReadTheDocs status"> + </a> + <!-- CodeCov(erage) --> + <a href="https://codecov.io/gh/PTB-M4D/PyDynamic"> + <img src="https://codecov.io/gh/PTB-M4D/PyDynamic/branch/main/graph/badge.svg" alt=" PyDynamic's CodeCov badge"> + </a> + <!-- Codacy --> + <a href="https://www.codacy.com/gh/PTB-M4D/PyDynamic/dashboard?utm_source=github.com&utm_medium=referral&utm_content=PTB-M4D/PyDynamic&utm_campaign=Badge_Grade"> + <img src="https://app.codacy.com/project/badge/Grade/db86b58d6fa5446e8408644c8196f5e2" alt=" PyDynamic's Codacy badge"> + </a> + <!-- PyPI Version --> + <a href="https://pypi.org/project/pydynamic"> + <img src="https://img.shields.io/pypi/v/pydynamic.svg?label=release&color=blue&style=flat-square" alt=" PyDynamic's PyPI version number"> + </a> + <!-- PyPI License --> + <a href="https://www.gnu.org/licenses/lgpl-3.0.en.html"> + <img alt="PyPI - license badge" src="https://img.shields.io/pypi/l/pydynamic?color=bright"> + </a> + <!-- Zenodo DOI --> + <a href="https://doi.org/10.5281/zenodo.1489877"> + <img src="https://zenodo.org/badge/DOI/10.5281/zenodo.1489877.svg" alt="DOI"></a> +</p> + +# Python library for the analysis of dynamic measurements + +<p align="justify"> +The goal of this library is to provide a starting point for users in metrology and +related areas who deal with time-dependent i.e., <i>dynamic</i>, measurements. The +initial version of this software was developed as part of a joint research project of +the national metrology institutes from Germany and the UK, i.e. +<a href="https://www.ptb.de/cms/en.html">Physikalisch-Technische Bundesanstalt</a> +and the <a href="https://www.npl.co.uk">National Physical Laboratory</a>. +</p> + +<p align="justify"> +Further development and explicit use of PyDynamic was part of the European research +project <a href="https://www.ptb.de/empir2018/met4fof/home/">EMPIR 17IND12 +Met4FoF</a> and the German research project <a href="https://famous-project. +eu">FAMOUS</a>. Since the end of these two projects, development of PyDynamic continues mostly based on feature requests and smaller collaborations. +</p> + +## Table of content + +- [Quickstart](#quickstart) +- [Features](#features) +- [Module diagram](#module-diagram) +- [Documentation](#documentation) +- [Installation](#installation) +- [Contributing](#contributing) +- [Examples](#examples) +- [Roadmap](#roadmap) +- [Citation](#citation) +- [Acknowledgement](#acknowledgement) +- [Disclaimer](#disclaimer) +- [License](#license) + +## Quickstart + +To dive right into it, install PyDynamic and execute one of the examples: + +```shell +(my_PyDynamice_venv) $ pip install PyDynamic +Collecting PyDynamic +[...] +Successfully installed PyDynamic-[...] +(my_PyDynamice_venv) $ python +Python 3.9.7 (default, Aug 31 2021, 13:28:12) +[GCC 11.1.0] on linux +Type "help", "copyright", "credits" or "license" for more information. +``` +```python +>>> from PyDynamic.examples.uncertainty_for_dft.deconv_DFT import DftDeconvolutionExample +>>> DftDeconvolutionExample() +Propagating uncertainty associated with measurement through DFT +Propagating uncertainty associated with calibration data to real and imag part +Propagating uncertainty through the inverse system +Propagating uncertainty through the low-pass filter +Propagating uncertainty associated with the estimate back to time domain +``` + +You will see a couple of plots opening up to observe the results. For +further information just read on and visit our +[tutorial section](#examples). + +## Features + +PyDynamic offers propagation of *uncertainties* for + +- application of the discrete Fourier transform and its inverse +- filtering with an FIR or IIR filter with uncertain coefficients +- design of a FIR filter as the inverse of a frequency response with + uncertain coefficients +- design on an IIR filter as the inverse of a frequency response with + uncertain coefficients +- deconvolution in the frequency domain by division +- multiplication in the frequency domain +- transformation from amplitude and phase to a representation by real and + imaginary parts +- 1-dimensional interpolation + +For the validation of the propagation of uncertainties, the Monte-Carlo +method can be applied using a memory-efficient implementation of Monte-Carlo +for digital filtering. + +## Module diagram + +The fundamental structure of PyDynamic is shown in the following figure. + +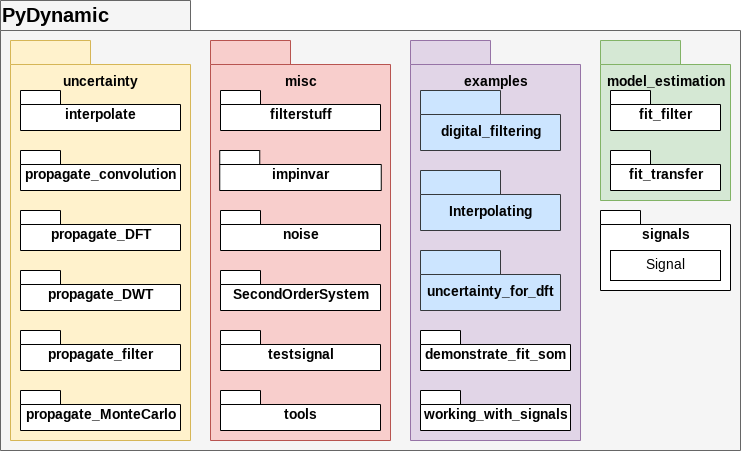 + +However, imports should generally be possible without explicitly naming all packages +and modules in the path, so that for example the following import statements are all +equivalent. + +```python +from PyDynamic.uncertainty.propagate_filter import FIRuncFilter +from PyDynamic.uncertainty import FIRuncFilter +from PyDynamic import FIRuncFilter +``` + +## Documentation + +The documentation for PyDynamic can be found on +[ReadTheDocs](http://pydynamic.readthedocs.io) + +## Installation + +The installation of PyDynamic is as straightforward as the Python ecosystem suggests. +Detailed instructions on different options to install PyDynamic you can find in the +[installation section of the docs](https://pydynamic.readthedocs.io/en/latest/INSTALL.html). + +## Contributing + +Whenever you are involved with PyDynamic, please respect our [Code of Conduct +](https://github.com/PTB-M4D/PyDynamic/blob/main/CODE_OF_CONDUCT.md). +If you want to contribute back to the project, after reading our Code of Conduct, +take a look at our open developments in the [project board +](https://github.com/PTB-M4D/PyDynamic/projects/1), [pull requests +](https://github.com/PTB-M4D/PyDynamic/pulls) and search [the issues +](https://github.com/PTB-M4D/PyDynamic/issues). If you find something similar to +your ideas or troubles, let us know by leaving a comment or remark. If you have +something new to tell us, feel free to open a feature request or bug report in the +issues. If you want to contribute code or improve our documentation, please check our +[contribution advices and tips](https://pydynamic.readthedocs.io/en/latest/CONTRIBUTING.html). + +If you have downloaded this software, we would be very thankful for letting +us know. You may, for instance, drop an email to one of the [authors +](https://github.com/PTB-M4D/PyDynamic/graphs/contributors) (e.g. +[Sascha Eichstädt](mailto:sascha.eichstaedt@ptb.de), [Björn Ludwig +](mailto:bjoern.ludwig@ptb.de) or [Maximilian Gruber +](mailto:maximilian.gruber@ptb.de)) + +## Examples + +We have collected extended material for an easier introduction to PyDynamic in the +package _examples_. Detailed assistance on getting started you can find in the +corresponding sections of the docs: + +* [examples](https://pydynamic.readthedocs.io/en/latest/Examples.html) +* [tutorials](https://pydynamic.readthedocs.io/en/latest/Tutorials.html) + +In various Jupyter Notebooks and scripts we demonstrate the use of +the provided methods to aid the first steps in PyDynamic. New features are introduced +with an example from the beginning if feasible. We are currently moving this supporting +collection to an external repository on GitHub. They will be available at +[github.com/PTB-M4D/PyDynamic_tutorials](https://github.com/PTB-M4D/PyDynamic_tutorials) +in the near future. + +## Roadmap + +1. Implementation of robust measurement (sensor) models +1. Extension to more complex noise and uncertainty models +1. Introducing uncertainty propagation for Kalman filters + +For a comprehensive overview of current development activities and upcoming tasks, +take a look at the [project board](https://github.com/PTB-M4D/PyDynamic/projects/1), +[issues](https://github.com/PTB-M4D/PyDynamic/issues) and +[pull requests](https://github.com/PTB-M4D/PyDynamic/pulls). + +## Citation + +If you publish results obtained with the help of PyDynamic, please use the above linked +[Zenodo DOI](https://doi.org/10.5281/zenodo.1489877) for the code itself or cite + +Sascha Eichstädt, Clemens Elster, Ian M. Smith, and Trevor J. Esward +*Evaluation of dynamic measurement uncertainty – an open-source software +package to bridge theory and practice* +**J. Sens. Sens. Syst.**, 6, 97-105, 2017, DOI: [10.5194/jsss-6-97-2017 +](https://doi.org/10.5194/jsss-6-97-2017) + +## Acknowledgement + +Part of this work is developed as part of the Joint Research Project [17IND12 Met4FoF +](http://met4fof.eu) of the European Metrology Programme for Innovation and +Research (EMPIR). + +This work was part of the Joint Support for Impact project +[14SIP08](https://www.euramet.org/research-innovation/search-research-projects/details/project/standards-and-software-to-maximise-end-user-uptake-of-nmi-calibrations-of-dynamic-force-torque-and/) +of the European Metrology Programme for Innovation and Research (EMPIR). The +[EMPIR](http://msu.euramet.org) is jointly funded by the EMPIR participating +countries within EURAMET and the European Union. + +## Disclaimer + +This software is developed at Physikalisch-Technische Bundesanstalt (PTB). The +software is made available "as is" free of cost. PTB assumes no responsibility +whatsoever for its use by other parties, and makes no guarantees, expressed or +implied, about its quality, reliability, safety, suitability or any other +characteristic. In no event will PTB be liable for any direct, indirect or +consequential damage arising in connection with the use of this software. + +## License + +PyDynamic is distributed under the [LGPLv3 license +](https://github.com/PTB-M4D/PyDynamic/blob/main/licence.txt) +except for the module [`impinvar.py` +](https://github.com/PTB-M4D/PyDynamic/blob/main/src/PyDynamic/misc/impinvar.py) +in the package [`misc` +](https://pydynamic.readthedocs.io/en/main/PyDynamic.misc.html), +which is distributed under the [GPLv3 license +](https://github.com/PTB-M4D/PyDynamic/blob/main/src/PyDynamic/misc/impinvar_license.txt). + + + + +%package -n python3-PyDynamic +Summary: A software package for the analysis of dynamic measurements +Provides: python-PyDynamic +BuildRequires: python3-devel +BuildRequires: python3-setuptools +BuildRequires: python3-pip +%description -n python3-PyDynamic +<img src="https://raw.githubusercontent.com/PTB-M4D/PyDynamic/main/docs/PyDynamic_logo.svg" alt="the logo of PyDynamic" title="PyDynamic logo"> +<p align="center"> + <!-- CircleCI Tests --> + <a href="https://circleci.com/gh/PTB-M4D/PyDynamic"><img alt="CircleCI pipeline status badge" src="https://circleci.com/gh/PTB-M4D/PyDynamic.svg?style=shield"></a> + <!-- ReadTheDocs Documentation --> + <a href="https://pydynamic.readthedocs.io/en/latest/index.html"> + <img src="https://readthedocs.org/projects/pydynamic/badge/?version=latest" alt="PyDynamic's ReadTheDocs status"> + </a> + <!-- CodeCov(erage) --> + <a href="https://codecov.io/gh/PTB-M4D/PyDynamic"> + <img src="https://codecov.io/gh/PTB-M4D/PyDynamic/branch/main/graph/badge.svg" alt=" PyDynamic's CodeCov badge"> + </a> + <!-- Codacy --> + <a href="https://www.codacy.com/gh/PTB-M4D/PyDynamic/dashboard?utm_source=github.com&utm_medium=referral&utm_content=PTB-M4D/PyDynamic&utm_campaign=Badge_Grade"> + <img src="https://app.codacy.com/project/badge/Grade/db86b58d6fa5446e8408644c8196f5e2" alt=" PyDynamic's Codacy badge"> + </a> + <!-- PyPI Version --> + <a href="https://pypi.org/project/pydynamic"> + <img src="https://img.shields.io/pypi/v/pydynamic.svg?label=release&color=blue&style=flat-square" alt=" PyDynamic's PyPI version number"> + </a> + <!-- PyPI License --> + <a href="https://www.gnu.org/licenses/lgpl-3.0.en.html"> + <img alt="PyPI - license badge" src="https://img.shields.io/pypi/l/pydynamic?color=bright"> + </a> + <!-- Zenodo DOI --> + <a href="https://doi.org/10.5281/zenodo.1489877"> + <img src="https://zenodo.org/badge/DOI/10.5281/zenodo.1489877.svg" alt="DOI"></a> +</p> + +# Python library for the analysis of dynamic measurements + +<p align="justify"> +The goal of this library is to provide a starting point for users in metrology and +related areas who deal with time-dependent i.e., <i>dynamic</i>, measurements. The +initial version of this software was developed as part of a joint research project of +the national metrology institutes from Germany and the UK, i.e. +<a href="https://www.ptb.de/cms/en.html">Physikalisch-Technische Bundesanstalt</a> +and the <a href="https://www.npl.co.uk">National Physical Laboratory</a>. +</p> + +<p align="justify"> +Further development and explicit use of PyDynamic was part of the European research +project <a href="https://www.ptb.de/empir2018/met4fof/home/">EMPIR 17IND12 +Met4FoF</a> and the German research project <a href="https://famous-project. +eu">FAMOUS</a>. Since the end of these two projects, development of PyDynamic continues mostly based on feature requests and smaller collaborations. +</p> + +## Table of content + +- [Quickstart](#quickstart) +- [Features](#features) +- [Module diagram](#module-diagram) +- [Documentation](#documentation) +- [Installation](#installation) +- [Contributing](#contributing) +- [Examples](#examples) +- [Roadmap](#roadmap) +- [Citation](#citation) +- [Acknowledgement](#acknowledgement) +- [Disclaimer](#disclaimer) +- [License](#license) + +## Quickstart + +To dive right into it, install PyDynamic and execute one of the examples: + +```shell +(my_PyDynamice_venv) $ pip install PyDynamic +Collecting PyDynamic +[...] +Successfully installed PyDynamic-[...] +(my_PyDynamice_venv) $ python +Python 3.9.7 (default, Aug 31 2021, 13:28:12) +[GCC 11.1.0] on linux +Type "help", "copyright", "credits" or "license" for more information. +``` +```python +>>> from PyDynamic.examples.uncertainty_for_dft.deconv_DFT import DftDeconvolutionExample +>>> DftDeconvolutionExample() +Propagating uncertainty associated with measurement through DFT +Propagating uncertainty associated with calibration data to real and imag part +Propagating uncertainty through the inverse system +Propagating uncertainty through the low-pass filter +Propagating uncertainty associated with the estimate back to time domain +``` + +You will see a couple of plots opening up to observe the results. For +further information just read on and visit our +[tutorial section](#examples). + +## Features + +PyDynamic offers propagation of *uncertainties* for + +- application of the discrete Fourier transform and its inverse +- filtering with an FIR or IIR filter with uncertain coefficients +- design of a FIR filter as the inverse of a frequency response with + uncertain coefficients +- design on an IIR filter as the inverse of a frequency response with + uncertain coefficients +- deconvolution in the frequency domain by division +- multiplication in the frequency domain +- transformation from amplitude and phase to a representation by real and + imaginary parts +- 1-dimensional interpolation + +For the validation of the propagation of uncertainties, the Monte-Carlo +method can be applied using a memory-efficient implementation of Monte-Carlo +for digital filtering. + +## Module diagram + +The fundamental structure of PyDynamic is shown in the following figure. + + + +However, imports should generally be possible without explicitly naming all packages +and modules in the path, so that for example the following import statements are all +equivalent. + +```python +from PyDynamic.uncertainty.propagate_filter import FIRuncFilter +from PyDynamic.uncertainty import FIRuncFilter +from PyDynamic import FIRuncFilter +``` + +## Documentation + +The documentation for PyDynamic can be found on +[ReadTheDocs](http://pydynamic.readthedocs.io) + +## Installation + +The installation of PyDynamic is as straightforward as the Python ecosystem suggests. +Detailed instructions on different options to install PyDynamic you can find in the +[installation section of the docs](https://pydynamic.readthedocs.io/en/latest/INSTALL.html). + +## Contributing + +Whenever you are involved with PyDynamic, please respect our [Code of Conduct +](https://github.com/PTB-M4D/PyDynamic/blob/main/CODE_OF_CONDUCT.md). +If you want to contribute back to the project, after reading our Code of Conduct, +take a look at our open developments in the [project board +](https://github.com/PTB-M4D/PyDynamic/projects/1), [pull requests +](https://github.com/PTB-M4D/PyDynamic/pulls) and search [the issues +](https://github.com/PTB-M4D/PyDynamic/issues). If you find something similar to +your ideas or troubles, let us know by leaving a comment or remark. If you have +something new to tell us, feel free to open a feature request or bug report in the +issues. If you want to contribute code or improve our documentation, please check our +[contribution advices and tips](https://pydynamic.readthedocs.io/en/latest/CONTRIBUTING.html). + +If you have downloaded this software, we would be very thankful for letting +us know. You may, for instance, drop an email to one of the [authors +](https://github.com/PTB-M4D/PyDynamic/graphs/contributors) (e.g. +[Sascha Eichstädt](mailto:sascha.eichstaedt@ptb.de), [Björn Ludwig +](mailto:bjoern.ludwig@ptb.de) or [Maximilian Gruber +](mailto:maximilian.gruber@ptb.de)) + +## Examples + +We have collected extended material for an easier introduction to PyDynamic in the +package _examples_. Detailed assistance on getting started you can find in the +corresponding sections of the docs: + +* [examples](https://pydynamic.readthedocs.io/en/latest/Examples.html) +* [tutorials](https://pydynamic.readthedocs.io/en/latest/Tutorials.html) + +In various Jupyter Notebooks and scripts we demonstrate the use of +the provided methods to aid the first steps in PyDynamic. New features are introduced +with an example from the beginning if feasible. We are currently moving this supporting +collection to an external repository on GitHub. They will be available at +[github.com/PTB-M4D/PyDynamic_tutorials](https://github.com/PTB-M4D/PyDynamic_tutorials) +in the near future. + +## Roadmap + +1. Implementation of robust measurement (sensor) models +1. Extension to more complex noise and uncertainty models +1. Introducing uncertainty propagation for Kalman filters + +For a comprehensive overview of current development activities and upcoming tasks, +take a look at the [project board](https://github.com/PTB-M4D/PyDynamic/projects/1), +[issues](https://github.com/PTB-M4D/PyDynamic/issues) and +[pull requests](https://github.com/PTB-M4D/PyDynamic/pulls). + +## Citation + +If you publish results obtained with the help of PyDynamic, please use the above linked +[Zenodo DOI](https://doi.org/10.5281/zenodo.1489877) for the code itself or cite + +Sascha Eichstädt, Clemens Elster, Ian M. Smith, and Trevor J. Esward +*Evaluation of dynamic measurement uncertainty – an open-source software +package to bridge theory and practice* +**J. Sens. Sens. Syst.**, 6, 97-105, 2017, DOI: [10.5194/jsss-6-97-2017 +](https://doi.org/10.5194/jsss-6-97-2017) + +## Acknowledgement + +Part of this work is developed as part of the Joint Research Project [17IND12 Met4FoF +](http://met4fof.eu) of the European Metrology Programme for Innovation and +Research (EMPIR). + +This work was part of the Joint Support for Impact project +[14SIP08](https://www.euramet.org/research-innovation/search-research-projects/details/project/standards-and-software-to-maximise-end-user-uptake-of-nmi-calibrations-of-dynamic-force-torque-and/) +of the European Metrology Programme for Innovation and Research (EMPIR). The +[EMPIR](http://msu.euramet.org) is jointly funded by the EMPIR participating +countries within EURAMET and the European Union. + +## Disclaimer + +This software is developed at Physikalisch-Technische Bundesanstalt (PTB). The +software is made available "as is" free of cost. PTB assumes no responsibility +whatsoever for its use by other parties, and makes no guarantees, expressed or +implied, about its quality, reliability, safety, suitability or any other +characteristic. In no event will PTB be liable for any direct, indirect or +consequential damage arising in connection with the use of this software. + +## License + +PyDynamic is distributed under the [LGPLv3 license +](https://github.com/PTB-M4D/PyDynamic/blob/main/licence.txt) +except for the module [`impinvar.py` +](https://github.com/PTB-M4D/PyDynamic/blob/main/src/PyDynamic/misc/impinvar.py) +in the package [`misc` +](https://pydynamic.readthedocs.io/en/main/PyDynamic.misc.html), +which is distributed under the [GPLv3 license +](https://github.com/PTB-M4D/PyDynamic/blob/main/src/PyDynamic/misc/impinvar_license.txt). + + + + +%package help +Summary: Development documents and examples for PyDynamic +Provides: python3-PyDynamic-doc +%description help +<img src="https://raw.githubusercontent.com/PTB-M4D/PyDynamic/main/docs/PyDynamic_logo.svg" alt="the logo of PyDynamic" title="PyDynamic logo"> +<p align="center"> + <!-- CircleCI Tests --> + <a href="https://circleci.com/gh/PTB-M4D/PyDynamic"><img alt="CircleCI pipeline status badge" src="https://circleci.com/gh/PTB-M4D/PyDynamic.svg?style=shield"></a> + <!-- ReadTheDocs Documentation --> + <a href="https://pydynamic.readthedocs.io/en/latest/index.html"> + <img src="https://readthedocs.org/projects/pydynamic/badge/?version=latest" alt="PyDynamic's ReadTheDocs status"> + </a> + <!-- CodeCov(erage) --> + <a href="https://codecov.io/gh/PTB-M4D/PyDynamic"> + <img src="https://codecov.io/gh/PTB-M4D/PyDynamic/branch/main/graph/badge.svg" alt=" PyDynamic's CodeCov badge"> + </a> + <!-- Codacy --> + <a href="https://www.codacy.com/gh/PTB-M4D/PyDynamic/dashboard?utm_source=github.com&utm_medium=referral&utm_content=PTB-M4D/PyDynamic&utm_campaign=Badge_Grade"> + <img src="https://app.codacy.com/project/badge/Grade/db86b58d6fa5446e8408644c8196f5e2" alt=" PyDynamic's Codacy badge"> + </a> + <!-- PyPI Version --> + <a href="https://pypi.org/project/pydynamic"> + <img src="https://img.shields.io/pypi/v/pydynamic.svg?label=release&color=blue&style=flat-square" alt=" PyDynamic's PyPI version number"> + </a> + <!-- PyPI License --> + <a href="https://www.gnu.org/licenses/lgpl-3.0.en.html"> + <img alt="PyPI - license badge" src="https://img.shields.io/pypi/l/pydynamic?color=bright"> + </a> + <!-- Zenodo DOI --> + <a href="https://doi.org/10.5281/zenodo.1489877"> + <img src="https://zenodo.org/badge/DOI/10.5281/zenodo.1489877.svg" alt="DOI"></a> +</p> + +# Python library for the analysis of dynamic measurements + +<p align="justify"> +The goal of this library is to provide a starting point for users in metrology and +related areas who deal with time-dependent i.e., <i>dynamic</i>, measurements. The +initial version of this software was developed as part of a joint research project of +the national metrology institutes from Germany and the UK, i.e. +<a href="https://www.ptb.de/cms/en.html">Physikalisch-Technische Bundesanstalt</a> +and the <a href="https://www.npl.co.uk">National Physical Laboratory</a>. +</p> + +<p align="justify"> +Further development and explicit use of PyDynamic was part of the European research +project <a href="https://www.ptb.de/empir2018/met4fof/home/">EMPIR 17IND12 +Met4FoF</a> and the German research project <a href="https://famous-project. +eu">FAMOUS</a>. Since the end of these two projects, development of PyDynamic continues mostly based on feature requests and smaller collaborations. +</p> + +## Table of content + +- [Quickstart](#quickstart) +- [Features](#features) +- [Module diagram](#module-diagram) +- [Documentation](#documentation) +- [Installation](#installation) +- [Contributing](#contributing) +- [Examples](#examples) +- [Roadmap](#roadmap) +- [Citation](#citation) +- [Acknowledgement](#acknowledgement) +- [Disclaimer](#disclaimer) +- [License](#license) + +## Quickstart + +To dive right into it, install PyDynamic and execute one of the examples: + +```shell +(my_PyDynamice_venv) $ pip install PyDynamic +Collecting PyDynamic +[...] +Successfully installed PyDynamic-[...] +(my_PyDynamice_venv) $ python +Python 3.9.7 (default, Aug 31 2021, 13:28:12) +[GCC 11.1.0] on linux +Type "help", "copyright", "credits" or "license" for more information. +``` +```python +>>> from PyDynamic.examples.uncertainty_for_dft.deconv_DFT import DftDeconvolutionExample +>>> DftDeconvolutionExample() +Propagating uncertainty associated with measurement through DFT +Propagating uncertainty associated with calibration data to real and imag part +Propagating uncertainty through the inverse system +Propagating uncertainty through the low-pass filter +Propagating uncertainty associated with the estimate back to time domain +``` + +You will see a couple of plots opening up to observe the results. For +further information just read on and visit our +[tutorial section](#examples). + +## Features + +PyDynamic offers propagation of *uncertainties* for + +- application of the discrete Fourier transform and its inverse +- filtering with an FIR or IIR filter with uncertain coefficients +- design of a FIR filter as the inverse of a frequency response with + uncertain coefficients +- design on an IIR filter as the inverse of a frequency response with + uncertain coefficients +- deconvolution in the frequency domain by division +- multiplication in the frequency domain +- transformation from amplitude and phase to a representation by real and + imaginary parts +- 1-dimensional interpolation + +For the validation of the propagation of uncertainties, the Monte-Carlo +method can be applied using a memory-efficient implementation of Monte-Carlo +for digital filtering. + +## Module diagram + +The fundamental structure of PyDynamic is shown in the following figure. + + + +However, imports should generally be possible without explicitly naming all packages +and modules in the path, so that for example the following import statements are all +equivalent. + +```python +from PyDynamic.uncertainty.propagate_filter import FIRuncFilter +from PyDynamic.uncertainty import FIRuncFilter +from PyDynamic import FIRuncFilter +``` + +## Documentation + +The documentation for PyDynamic can be found on +[ReadTheDocs](http://pydynamic.readthedocs.io) + +## Installation + +The installation of PyDynamic is as straightforward as the Python ecosystem suggests. +Detailed instructions on different options to install PyDynamic you can find in the +[installation section of the docs](https://pydynamic.readthedocs.io/en/latest/INSTALL.html). + +## Contributing + +Whenever you are involved with PyDynamic, please respect our [Code of Conduct +](https://github.com/PTB-M4D/PyDynamic/blob/main/CODE_OF_CONDUCT.md). +If you want to contribute back to the project, after reading our Code of Conduct, +take a look at our open developments in the [project board +](https://github.com/PTB-M4D/PyDynamic/projects/1), [pull requests +](https://github.com/PTB-M4D/PyDynamic/pulls) and search [the issues +](https://github.com/PTB-M4D/PyDynamic/issues). If you find something similar to +your ideas or troubles, let us know by leaving a comment or remark. If you have +something new to tell us, feel free to open a feature request or bug report in the +issues. If you want to contribute code or improve our documentation, please check our +[contribution advices and tips](https://pydynamic.readthedocs.io/en/latest/CONTRIBUTING.html). + +If you have downloaded this software, we would be very thankful for letting +us know. You may, for instance, drop an email to one of the [authors +](https://github.com/PTB-M4D/PyDynamic/graphs/contributors) (e.g. +[Sascha Eichstädt](mailto:sascha.eichstaedt@ptb.de), [Björn Ludwig +](mailto:bjoern.ludwig@ptb.de) or [Maximilian Gruber +](mailto:maximilian.gruber@ptb.de)) + +## Examples + +We have collected extended material for an easier introduction to PyDynamic in the +package _examples_. Detailed assistance on getting started you can find in the +corresponding sections of the docs: + +* [examples](https://pydynamic.readthedocs.io/en/latest/Examples.html) +* [tutorials](https://pydynamic.readthedocs.io/en/latest/Tutorials.html) + +In various Jupyter Notebooks and scripts we demonstrate the use of +the provided methods to aid the first steps in PyDynamic. New features are introduced +with an example from the beginning if feasible. We are currently moving this supporting +collection to an external repository on GitHub. They will be available at +[github.com/PTB-M4D/PyDynamic_tutorials](https://github.com/PTB-M4D/PyDynamic_tutorials) +in the near future. + +## Roadmap + +1. Implementation of robust measurement (sensor) models +1. Extension to more complex noise and uncertainty models +1. Introducing uncertainty propagation for Kalman filters + +For a comprehensive overview of current development activities and upcoming tasks, +take a look at the [project board](https://github.com/PTB-M4D/PyDynamic/projects/1), +[issues](https://github.com/PTB-M4D/PyDynamic/issues) and +[pull requests](https://github.com/PTB-M4D/PyDynamic/pulls). + +## Citation + +If you publish results obtained with the help of PyDynamic, please use the above linked +[Zenodo DOI](https://doi.org/10.5281/zenodo.1489877) for the code itself or cite + +Sascha Eichstädt, Clemens Elster, Ian M. Smith, and Trevor J. Esward +*Evaluation of dynamic measurement uncertainty – an open-source software +package to bridge theory and practice* +**J. Sens. Sens. Syst.**, 6, 97-105, 2017, DOI: [10.5194/jsss-6-97-2017 +](https://doi.org/10.5194/jsss-6-97-2017) + +## Acknowledgement + +Part of this work is developed as part of the Joint Research Project [17IND12 Met4FoF +](http://met4fof.eu) of the European Metrology Programme for Innovation and +Research (EMPIR). + +This work was part of the Joint Support for Impact project +[14SIP08](https://www.euramet.org/research-innovation/search-research-projects/details/project/standards-and-software-to-maximise-end-user-uptake-of-nmi-calibrations-of-dynamic-force-torque-and/) +of the European Metrology Programme for Innovation and Research (EMPIR). The +[EMPIR](http://msu.euramet.org) is jointly funded by the EMPIR participating +countries within EURAMET and the European Union. + +## Disclaimer + +This software is developed at Physikalisch-Technische Bundesanstalt (PTB). The +software is made available "as is" free of cost. PTB assumes no responsibility +whatsoever for its use by other parties, and makes no guarantees, expressed or +implied, about its quality, reliability, safety, suitability or any other +characteristic. In no event will PTB be liable for any direct, indirect or +consequential damage arising in connection with the use of this software. + +## License + +PyDynamic is distributed under the [LGPLv3 license +](https://github.com/PTB-M4D/PyDynamic/blob/main/licence.txt) +except for the module [`impinvar.py` +](https://github.com/PTB-M4D/PyDynamic/blob/main/src/PyDynamic/misc/impinvar.py) +in the package [`misc` +](https://pydynamic.readthedocs.io/en/main/PyDynamic.misc.html), +which is distributed under the [GPLv3 license +](https://github.com/PTB-M4D/PyDynamic/blob/main/src/PyDynamic/misc/impinvar_license.txt). + + + + +%prep +%autosetup -n PyDynamic-2.4.0 + +%build +%py3_build + +%install +%py3_install +install -d -m755 %{buildroot}/%{_pkgdocdir} +if [ -d doc ]; then cp -arf doc %{buildroot}/%{_pkgdocdir}; fi +if [ -d docs ]; then cp -arf docs %{buildroot}/%{_pkgdocdir}; fi +if [ -d example ]; then cp -arf example %{buildroot}/%{_pkgdocdir}; fi +if [ -d examples ]; then cp -arf examples %{buildroot}/%{_pkgdocdir}; fi +pushd %{buildroot} +if [ -d usr/lib ]; then + find usr/lib -type f -printf "/%h/%f\n" >> filelist.lst +fi +if [ -d usr/lib64 ]; then + find usr/lib64 -type f -printf "/%h/%f\n" >> filelist.lst +fi +if [ -d usr/bin ]; then + find usr/bin -type f -printf "/%h/%f\n" >> filelist.lst +fi +if [ -d usr/sbin ]; then + find usr/sbin -type f -printf "/%h/%f\n" >> filelist.lst +fi +touch doclist.lst +if [ -d usr/share/man ]; then + find usr/share/man -type f -printf "/%h/%f.gz\n" >> doclist.lst +fi +popd +mv %{buildroot}/filelist.lst . +mv %{buildroot}/doclist.lst . + +%files -n python3-PyDynamic -f filelist.lst +%dir %{python3_sitelib}/* + +%files help -f doclist.lst +%{_docdir}/* + +%changelog +* Fri May 05 2023 Python_Bot <Python_Bot@openeuler.org> - 2.4.0-1 +- Package Spec generated @@ -0,0 +1 @@ +0d293502d9751ec7f11bd20e72767ac2 PyDynamic-2.4.0.tar.gz |